Spatial Intelligence for Autonomous Robot Navigation
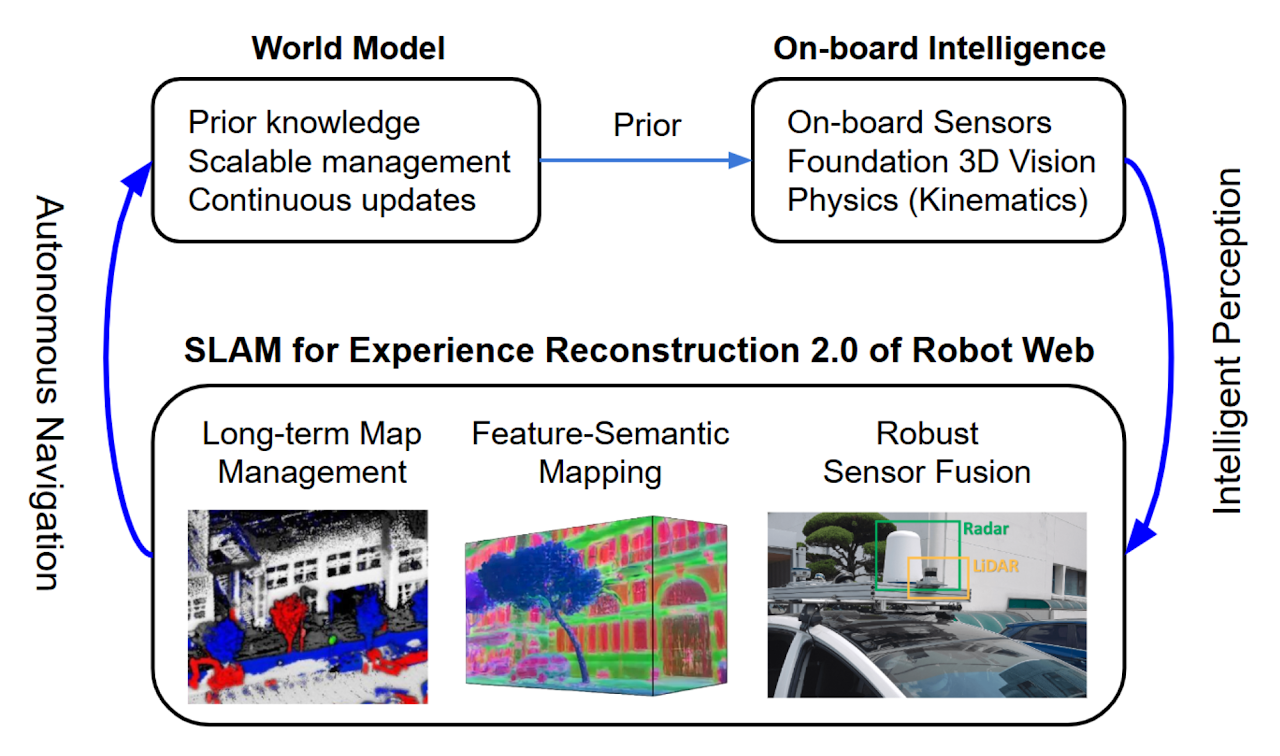
- SLAM 2.0 for Robot Web era
- Neural map representations
- Human-robot interactive visual-language navigation
Current research interests and methodological expertise from APRL.
Through these directions, we aim to answer questions such as:
How can robots leverage the spatial experience accumulated during long-term operation in a task-relevant way?
Research plan for 2026-2030, including spatial intelligence and autonomous navigation directions.
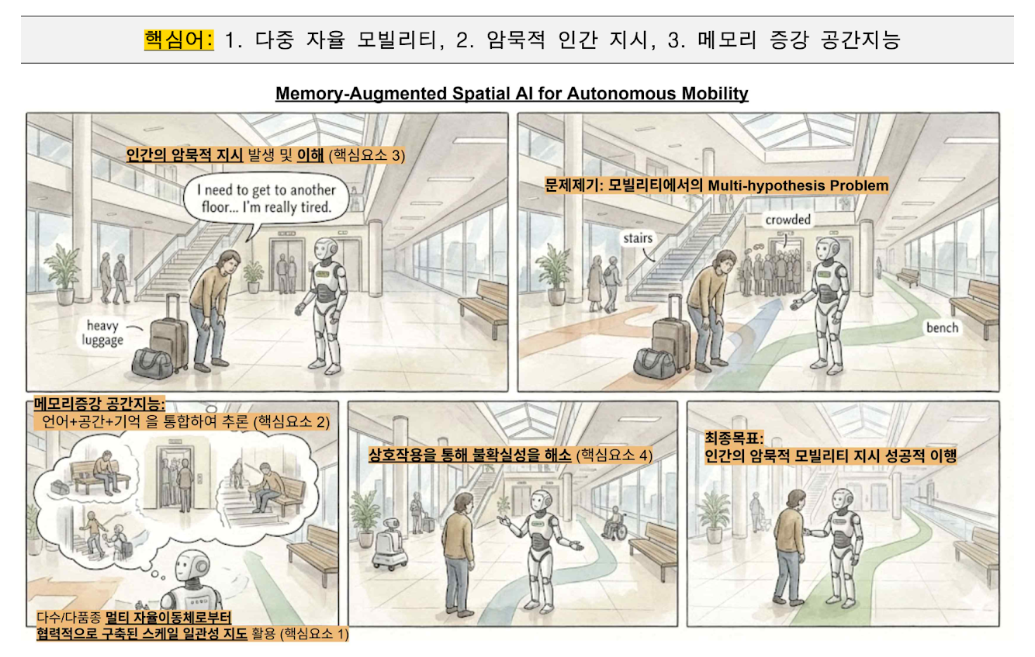
Project overview for multi-robot autonomy, implicit interaction, and memory-augmented spatial intelligence.

Date: 2026.07.03 · Event/Session: ICROS 2026 Outstanding Young Researcher Award Presentation
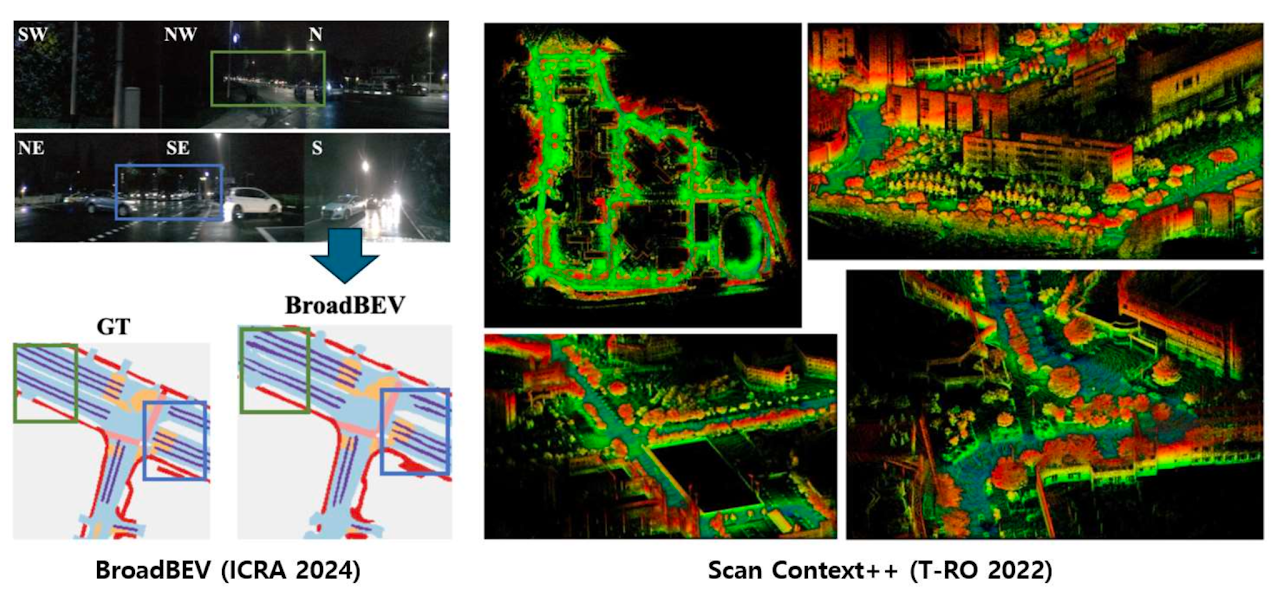
Mission: map the world with low-cost sensors.
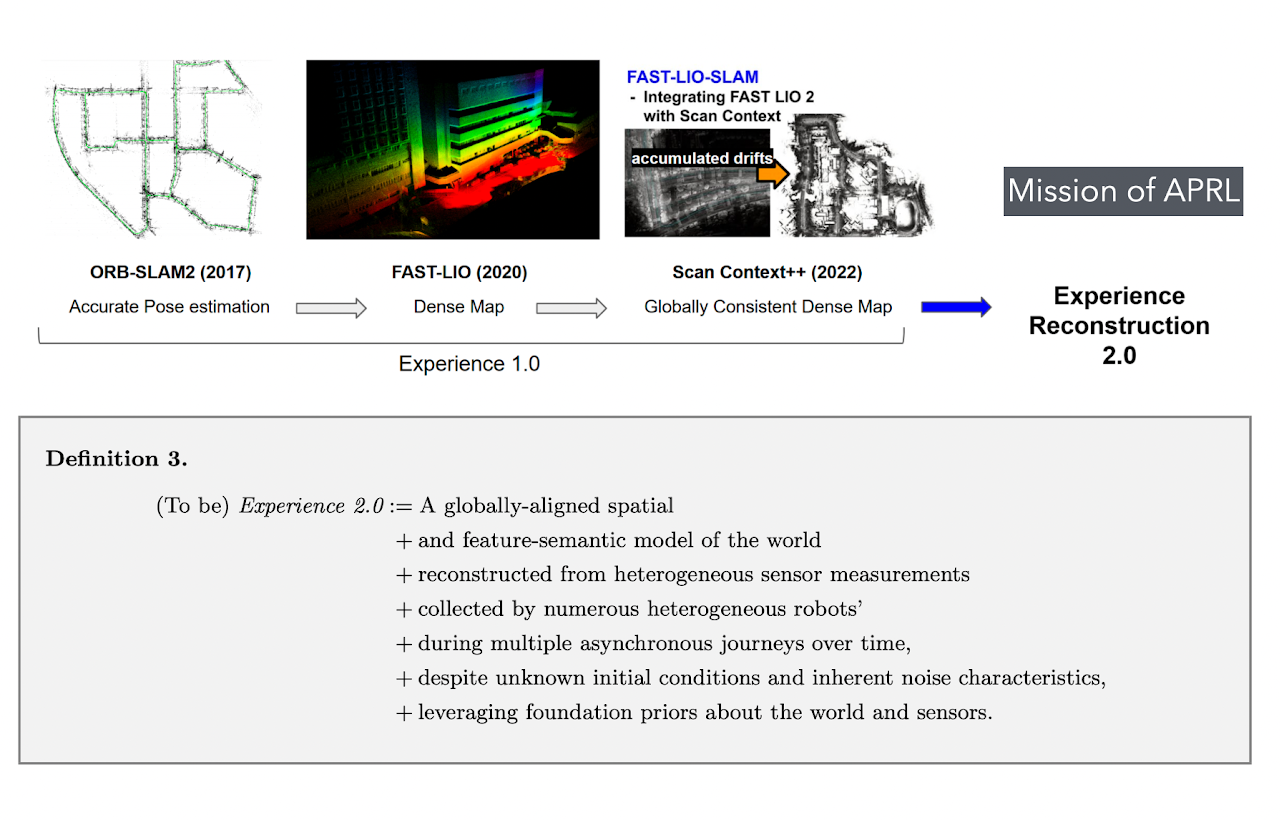
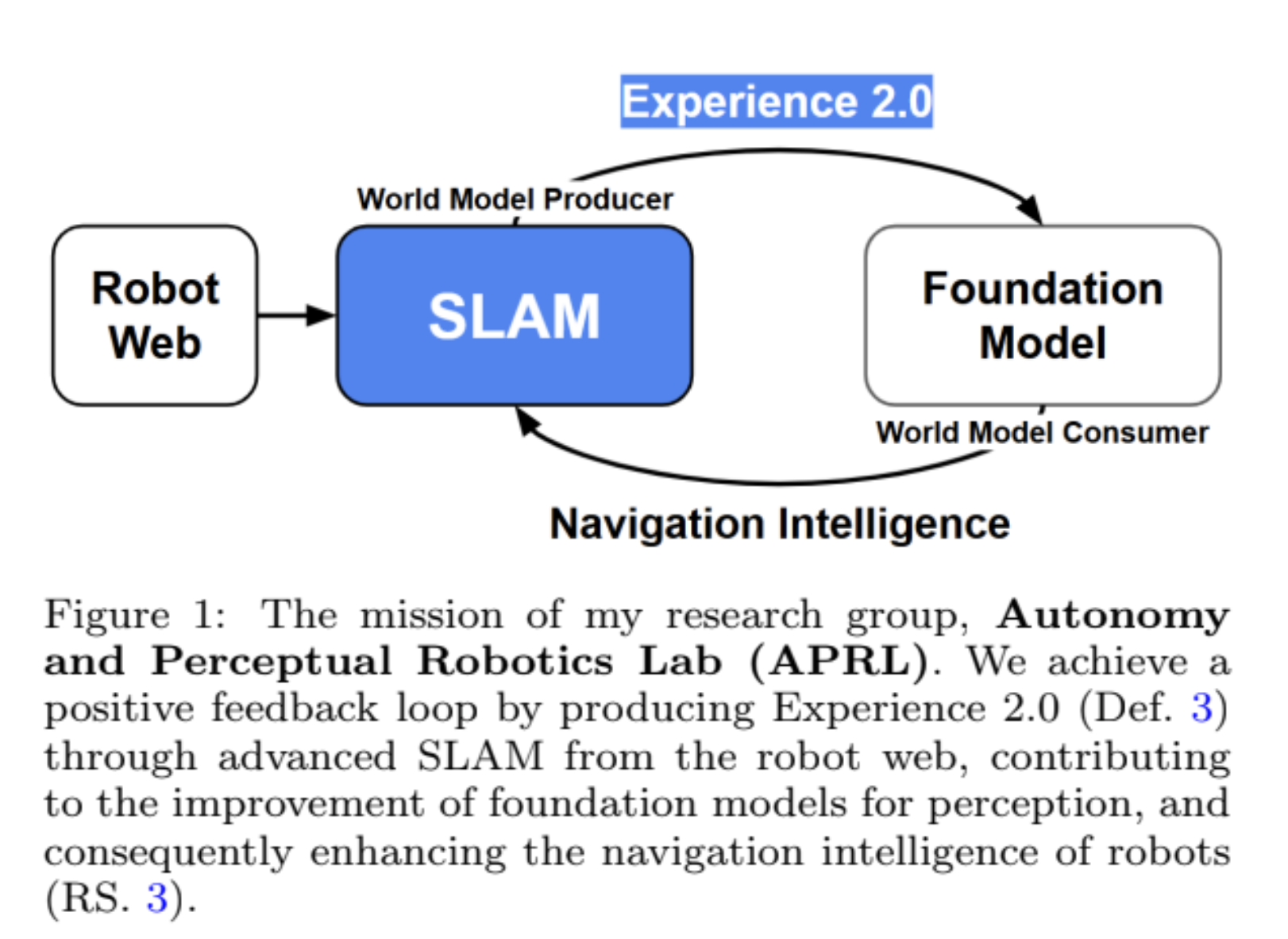
Mission: Be a SLAM 2.0 problem owner and leader.
Mission: SLAM helps foundation models, and vice versa.