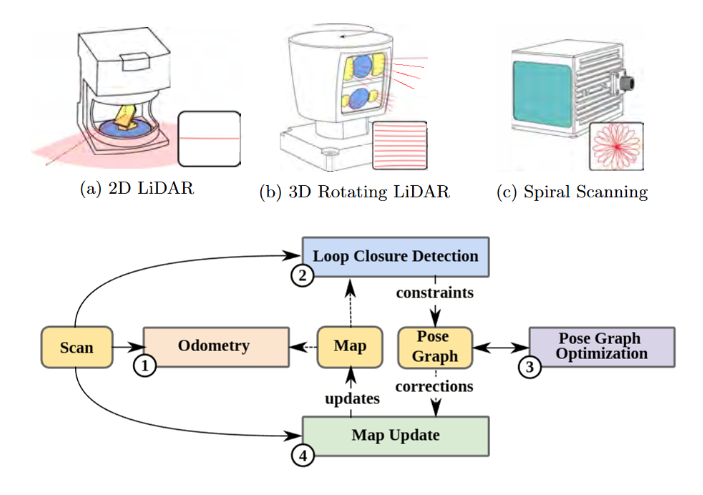
Venue/BookSLAM Handbook (From Localization and Mapping to Spatial Intelligence)AuthorsJens Behley, Maurice Fallon, Shibo Zhao, Giseop Kim, Ji Zhang, Fu Zhang, Ayoung Kim
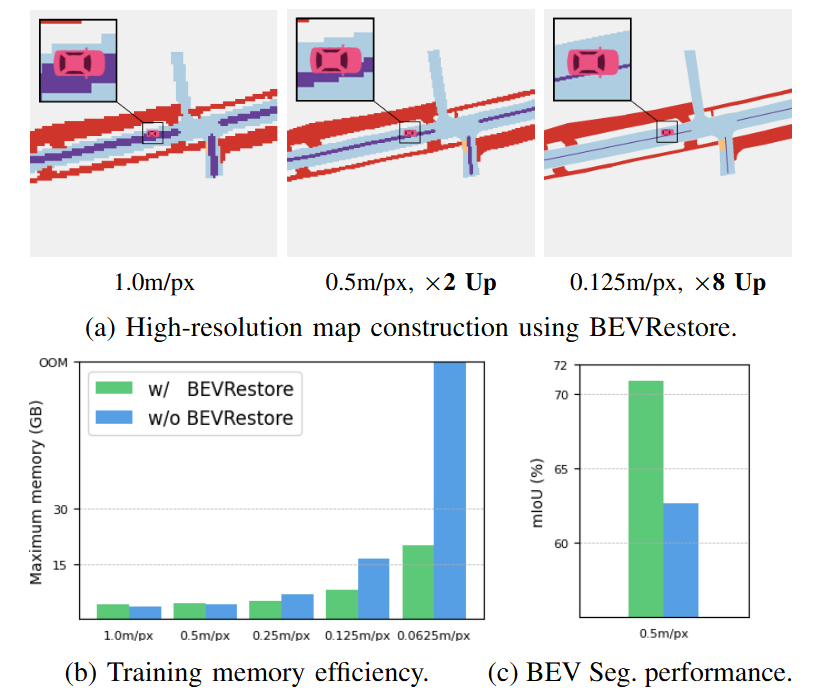
Addressing Diverging Training Costs Using BEVRestore for High-Resolution Bird's Eye View Map Construction
Venue/BookIEEE Robotics and Automation Letters (RA-L)InfoVol. 9, No. 11, pp. 10700-10707; DOI 10.1109/LRA.2024.3474477AuthorsMinsu Kim*, Giseop Kim, Sunwook Choi†CollaborationNAVER LABS
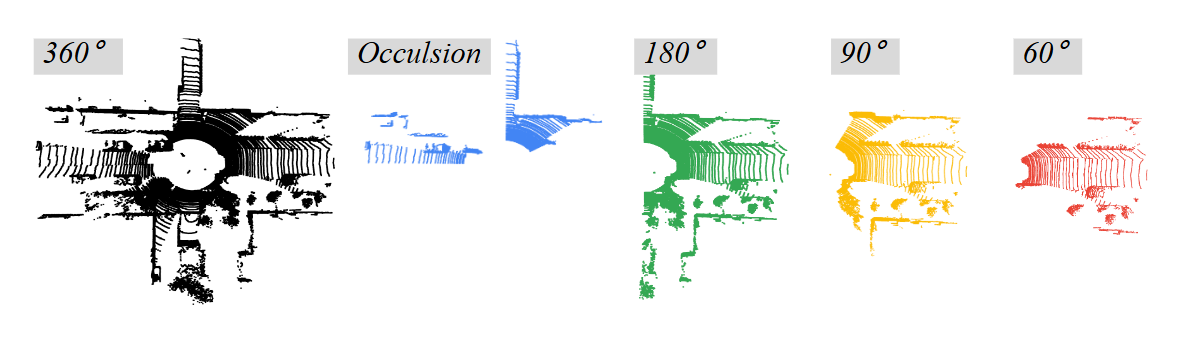
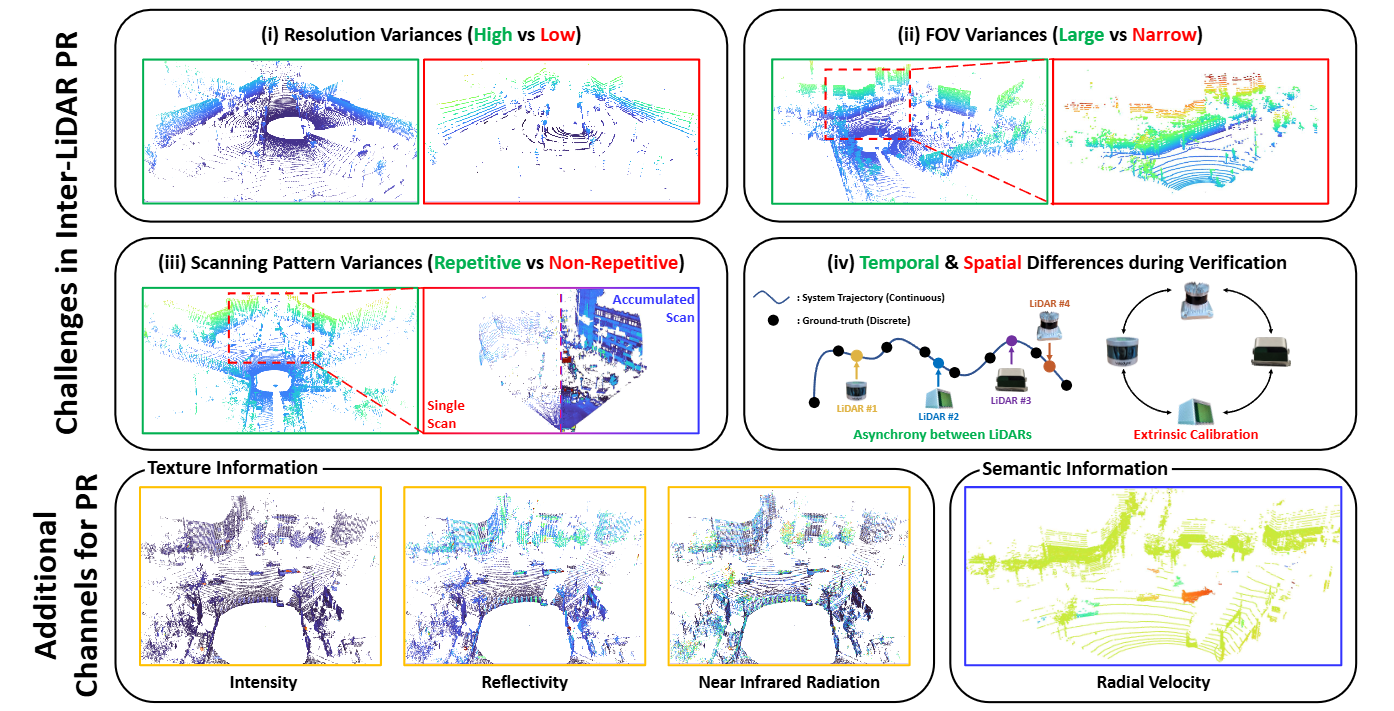
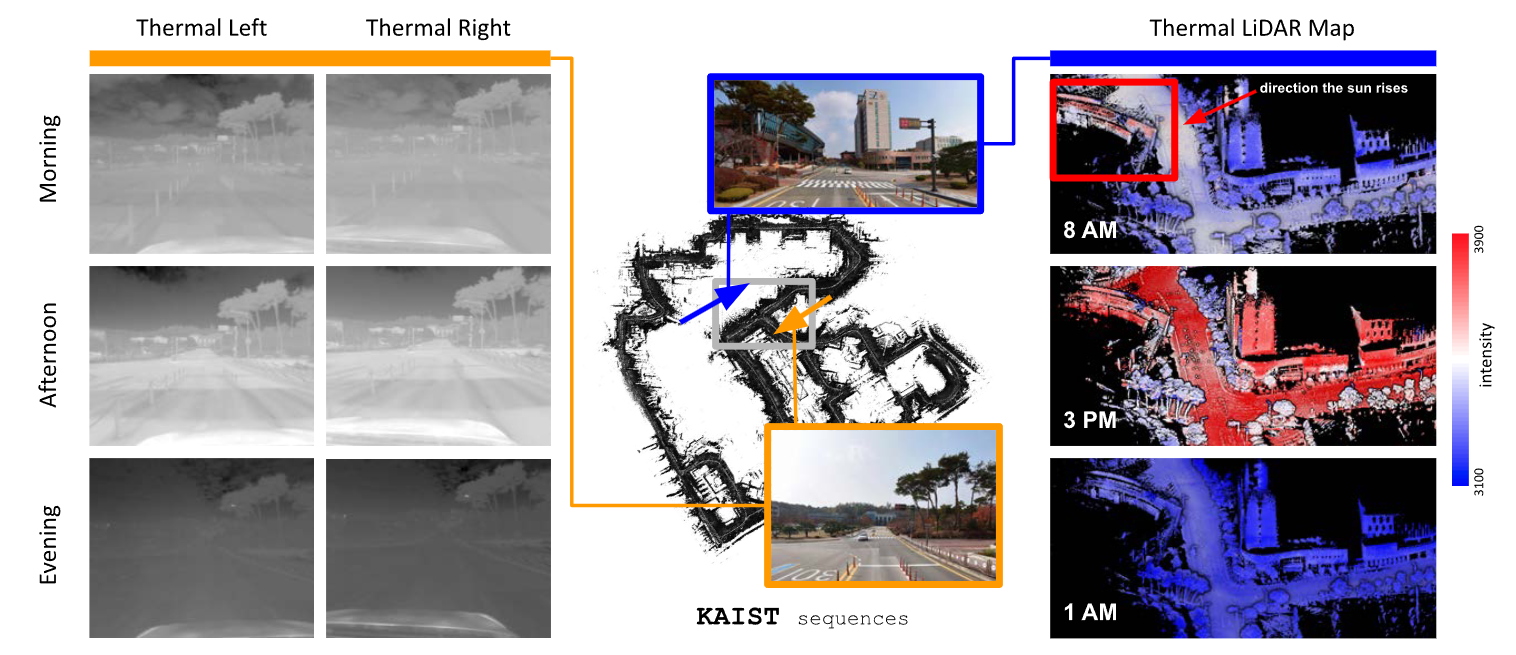
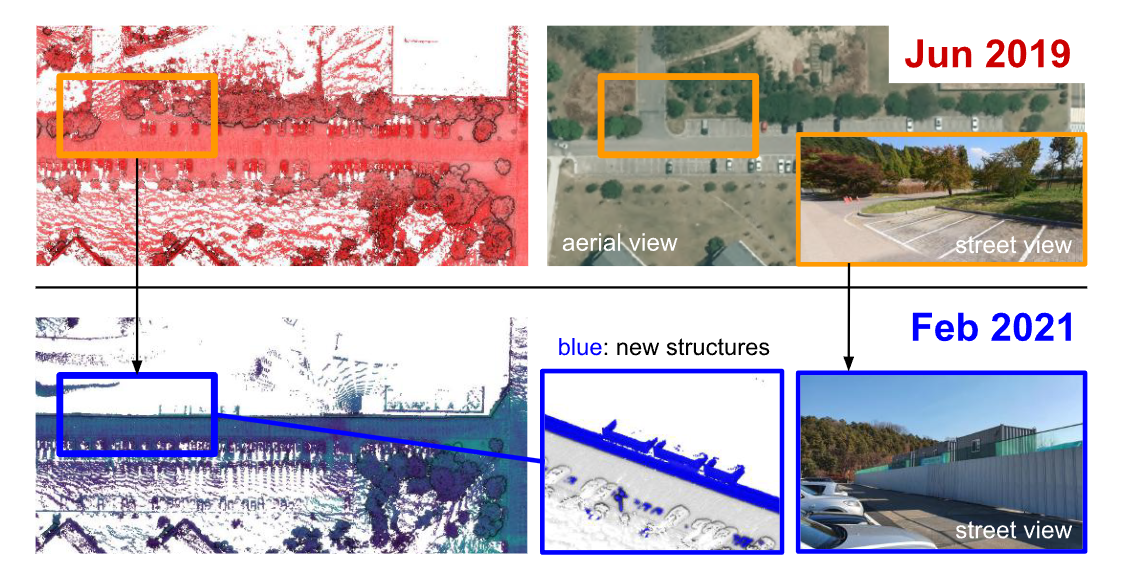
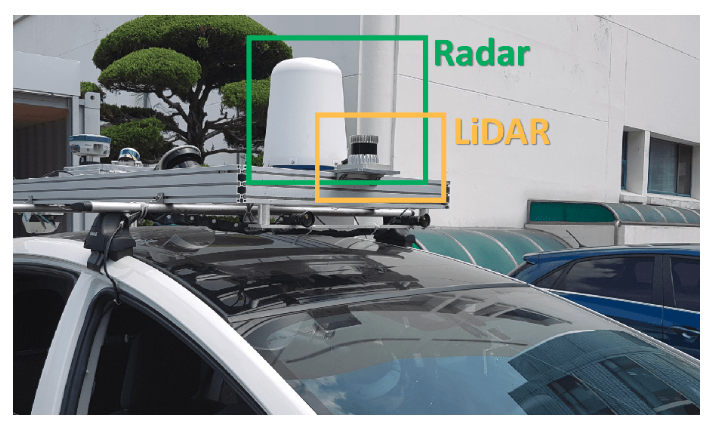
HeLiPR: Heterogeneous LiDAR Dataset for Inter-LiDAR Place Recognition under Spatiotemporal Variations
Venue/BookThe International Journal of Robotics Research (IJRR)InfoVol. 43, No. 12, pp. 1867-1883; DOI 10.1177/02783649241242136AuthorsMinwoo Jung*, Wooseong Yang, Dongjae Lee, Hyeonjae Gil, Giseop Kim, Ayoung Kim†CollaborationSNU
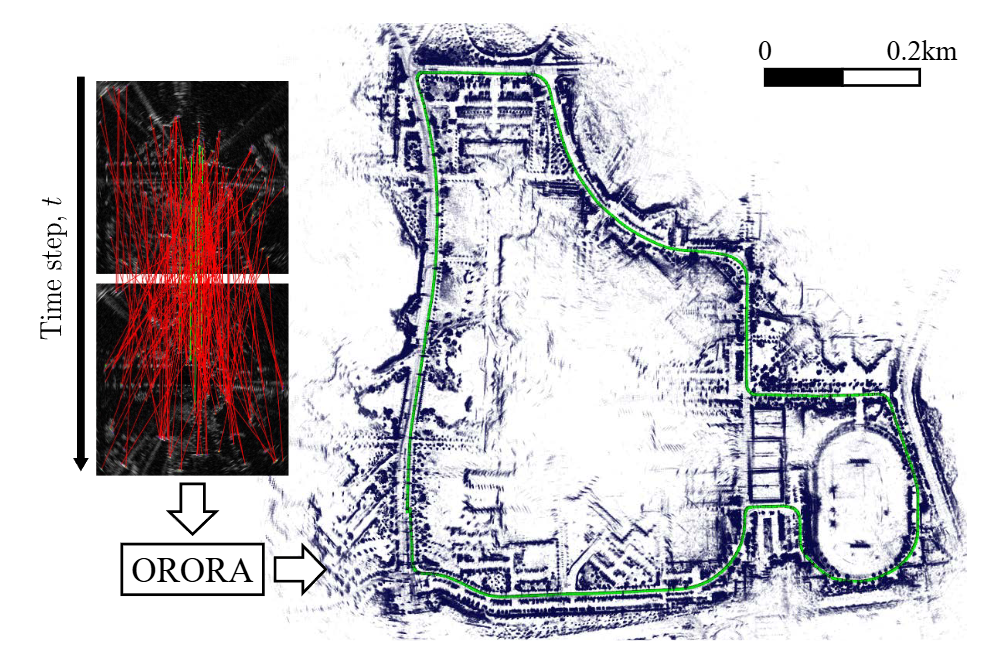
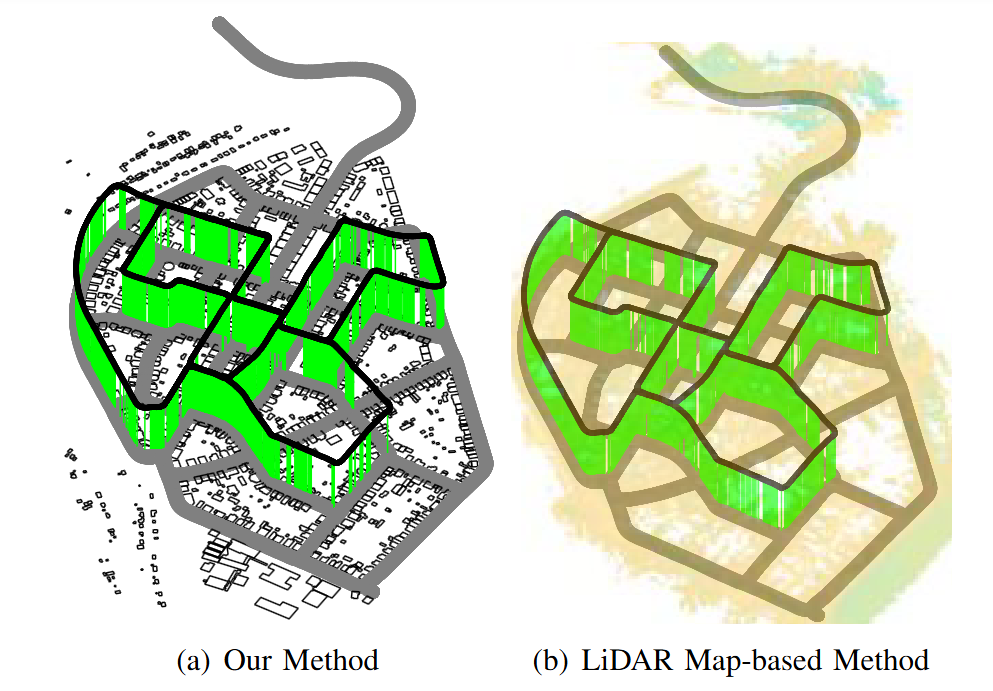
OpenStreetMap-based LiDAR Global Localization in Urban Environment without a Prior LiDAR Map
Venue/BookIEEE Robotics and Automation Letters (RA-L)InfoVol. 7, No. 2, pp. 4999-5006; DOI 10.1109/LRA.2022.3152476AuthorsYounghun Cho*, Giseop Kim, Sangmin Lee, Jee-Hwan Ryu†
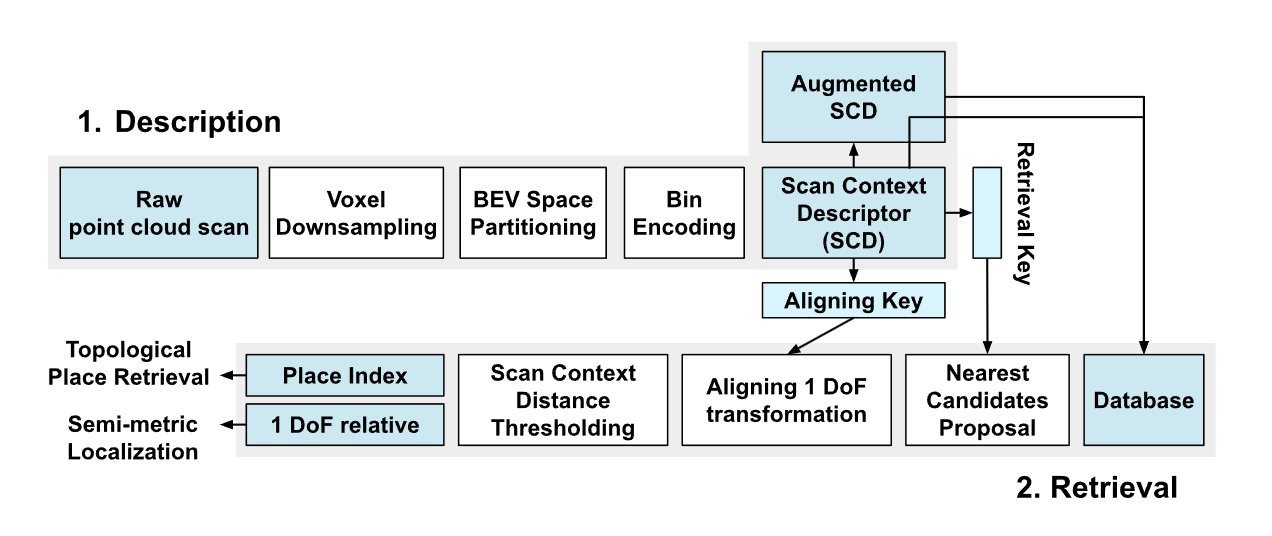
Venue/BookIEEE Robotics and Automation Letters (RA-L)InfoVol. 4, No. 2, pp. 1948-1955; DOI 10.1109/LRA.2019.2897340AuthorsGiseop Kim*, Byungjae Park, Ayoung Kim†